AIWelder™ × ARCMAN™ PORTABLE
溶接ロボットに画像センサを搭載した高難度溶接施工の自動化
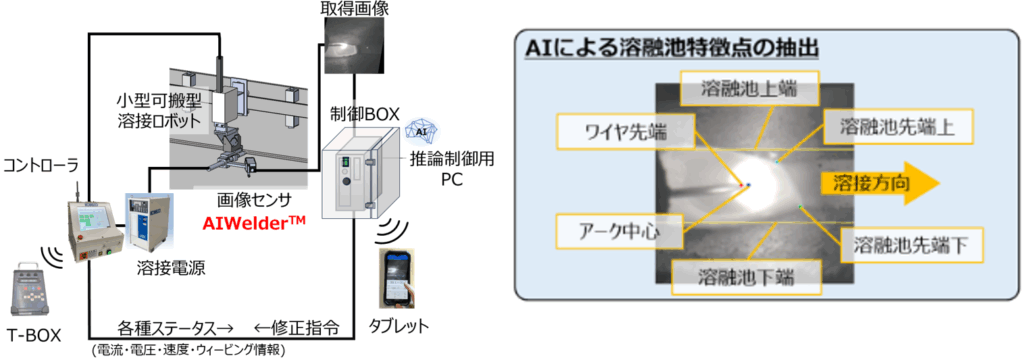
AI画像認識モデルを活用し、熟練を要する溶接を自動化。溶融池映像取得→AI画像認識モデルによる特徴点抽出→運棒制御データベースから条件を選定→リアルタイムフィードバック制御を繰り返し、裏波溶接を実現する。
展開先
関連するSDGs

関連する最終製品例

特徴
溶接工不足への対応
溶接工不足への対応として、現場溶接において小型可搬型溶接ロボットの適用が拡大している。その小型可搬型ロボットに画像センサを搭載し,撮像した溶融池映像からディープラーニングにより特徴点を抽出する。溶融池の状態を判断し、運棒制御データベースを元に適した溶接運棒条件に制御し直すことで、高難度である初層裏波溶接の自動化を実現する。本技術の実現により,溶接工不足問題の解消のみならず,品質安定化・トレーサビリティ向上も期待できる。
裏波溶接の自動化
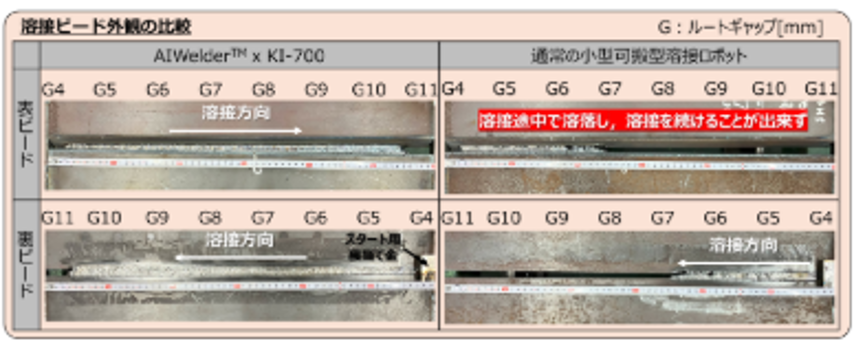
本システムによる溶接と通常のロボット機能による溶接を同一条件の試験体(レ形35°開先 ルートギャップ4-10mm)に対して実施した。
展示品は本システムによる溶接施工結果である。
通常ロボット機能との比較は写真にて掲示する。
(※通常ロボットでは本条件での溶接は推奨範囲外となっている)